

转载自公众号:视觉求索。作者朱松纯,加州大学洛杉矶分校UCLA统计学和计算机科学教授,视觉、认知、学习与自主机器人中心主任。
上部分:人工智能的历史、现状及发展趋势
引言
第一节现状:正视现实
第二节未来:一只乌鸦给我们的启示
第三节历史:从“春秋五霸”到“战国六雄”
下部分:人工智能研究的认知构架与统一
第四节统一:“小数据、大任务”范式与认知构架
第五节学科一:计算视觉---从“深”到“暗”
第六节学科二:认知推理---走进内心世界
第七节学科三:语言通讯---沟通的认知基础
第八节学科四:博弈伦理---获取、共享人类的价值观
第九节学科五:机器人学---构建大任务平台
第十节学科六:机器学习---学习的终极极限与“停机问题”
第十一节总结:智能科学---牛顿与达尔文的统一
附录 中科院自动化所报告会上的问答与互动摘录
人工智能研究的认知构架与统一
下面,进入我今天演讲的第二个主题:用一个什么样的构架把这些领域和问题统一起来。我不敢说我有答案,只是给大家提出一些问题、例子和思路,供大家思考。不要指望我给你提供代码,下载回去,调调参数就能发文章。
第四节人工智能研究的认知构架:
小数据、大任务范式
智能是一种现象,表现在个体和社会群体的行为过程中。回到前面乌鸦的例子,我认为智能系统的根源可以追溯到两个基本前提条件:
一、物理环境客观的现实与因果链条。这是外部物理环境给乌鸦提供的、生活的边界条件。在不同的环境条件下,智能的形式会是不一样的。任何智能的机器必须理解物理世界及其因果链条,适应这个世界。
二、智能物种与生俱来的任务与价值链条。这个任务是一个生物进化的“刚需”。如个体的生存,要解决吃饭和安全问题,而物种的传承需要交配和社会活动。这些基本任务会衍生出大量的其它的“任务”。动物的行为都是被各种任务驱动的。任务代表了价值观和决策函数,这些价值函数很多在进化过程中就已经形成了,包括人脑中发现的各种化学成分的奖惩调制,如多巴胺(快乐)、血清素(痛苦)、乙酰胆碱(焦虑、不确定性)、去甲肾上腺素(新奇、兴奋)等。
有了物理环境的因果链和智能物种的任务与价值链,那么一切都是可以推导出来的。要构造一个智能系统,如机器人或者游戏环境中的虚拟的人物,我们先给他们定义好身体的基本行动的功能,再定一个模型的空间(包括价值函数)。其实,生物的基因也就给了每个智能的个体这两点。然后,它就降临在某个环境和社会群体之中,就应该自主地生存,就像乌鸦那样找到一条活路:认识世界、利用世界、改造世界。
这里说的模型的空间是一个数学的概念,我们人脑时刻都在改变之中,也就是一个抽象的点,在这个空间中移动。模型的空间通过价值函数、决策函数、感知、认知、任务计划等来表达。通俗来说,一个脑模型就是世界观、人生观、价值观的一个数学的表达。这个空间的复杂度决定了个体的智商和成就。我后面会讲到,这个模型的表达方式和包含哪些基本要素。
有了这个先天的基本条件(设计)后,下一个重要问题:是什么驱动了模型在空间中的运动,也就是学习的过程?还是两点:
一、 外来的数据。外部世界通过各种感知信号,传递到人脑,塑造我们的模型。数据来源于观察(observation)和实践(experimentation)。观察的数据一般用于学习各种统计模型,这种模型就是某种时间和空间的联合分布,也就是统计的关联与相关性。实践的数据用于学习各种因果模型,将行为与结果联系在一起。因果与统计相关是不同的概念。
二、内在的任务。这就是由内在的价值函数驱动的行为、以期达到某种目的。我们的价值函数是在生物进化过程中形成的。因为任务的不同,我们往往对环境中有些变量非常敏感,而对其它一些变量不关心。由此,形成不同的模型。
机器人的脑、人脑都可以看成一个模型。任何一个模型由数据与任务来共同塑造。
现在,我们就来到一个很关键的地方。同样是在概率统计的框架下,当前的很多深度学习方法,属于一个被我称作“大数据、小任务范式(bigdataforsmalltask)”。针对某个特定的任务,如人脸识别和物体识别,设计一个简单的价值函数Lossfunction,用大量数据训练特定的模型。这种方法在某些问题上也很有效。但是,造成的结果是,这个模型不能泛化和解释。所谓泛化就是把模型用到其它任务,解释其实也是一种复杂的任务。这是必然的结果:你种的是瓜,怎么希望得豆呢?
我多年来一直在提倡的一个相反的思路:人工智能的发展,需要进入一个“小数据、大任务范式(smalldataforbigtasks)”,要用大量任务、而不是大量数据来塑造智能系统和模型。在哲学思想上,必须有一个思路上的大的转变和颠覆。自然辨证法里面,恩格斯讲过,“劳动创造了人”,这个有点争议。我认为一个更合适的说法是“任务塑造了智能”。人的各种感知和行为,时时刻刻都是被任务驱动的。这是我过去很多年来一直坚持的观点,也是为什么我总体上不认可深度学习这个学派的做法,虽然我自己是最早提倡统计建模与学习的一批人,但是后来我看到了更大的问题和局势。当然,我们的假设前提是智能系统已经有了前面讲的基本的设置,这个系统设置是亿万年的进化得来的,是不是通过大量数据了打磨(淘汰)出来的呢。有道理!如果我们把整个发展的过程都考虑进来,智能系统的影响可以分成三个时间段:(1)亿万年的进化,被达尔文理论的一个客观的适者生存的pheontypelandscape驱动;(2)千年的文化形成与传承;(3)几十年个体的学习与适应。我们人工智能研究通常考虑的是第三个阶段。
那么,如何定义大量的任务?人所感兴趣的任务有多少,是个什么空间结构?这个问题,心理和认知科学一直说不清楚,写不下来。这是人工智能发展的一个巨大挑战。
理清了这些前提条件,带着这样的问题,下面我用六节分别介绍六大领域的问题和例子,看能不能找到共性的、统一的框架和表达模型。过去几年来,我的研究中心一直把这六个领域的问题综合在一起研究,目的就是寻找一个统一的构架,找到“乌鸦”这个解。
第五节计算机视觉:从“深”到“暗”Dark,BeyondDeep
视觉是人脑最主要的信息来源,也是进入人工智能这个殿堂的大门。我自己的研究也正是从这里入手的。这一节以一个具体例子来介绍视觉里面的问题。当然,很多问题远远没有被解决。

这是我家厨房的一个视角。多年前的一个下午,我女儿放学回家,我正在写一个大的项目申请书,就拍了这一张作为例子。图像就是一个像素的二维矩阵,可是我们感知到非常丰富的三维场景、行为的信息;你看的时间越长,理解的也越多。下面我列举几个被主流(指大多数研究人员)忽视的、但是很关键的研究问题。
一、几何常识推理与三维场景构建。以前计算机视觉的研究,需要通过多张图像(多视角)之间特征点的对应关系,去计算这些点在三维世界坐标系的位置(SfM、SLAM)。其实人只需要一张图像就可以把三维几何估算出来。最早我在2002与一个学生韩峰发表了一篇文章,受到当时几何学派的嘲笑:一张图像怎么能计算三维呢,数学上说不通呀。其实,在我们的人造环境中,有很多几何常识和规律:比如,你坐的椅子高度就是你小腿的长度约16英寸,桌子约30英寸,案台约35英寸,门高约80英寸---都是按照人的身体尺寸和动作来设计的。另外,人造环境中有很多重复的东西,比如几个窗户一样大小一致,建筑设计和城市规划都有规则。这些就是geometriccommonsense,你根据这些几何的约束就可以定位很多点的三维位置,同时估计相机位置和光轴。
见下图所示,在这个三维场景中,我们的理解就可以表达成为一个层次分解(compositional)的时空因果的解译图(Spatial,TemporalandCausalParseGraph),简称STC-PG。STC-PG是一个极其重要的概念,我下面会逐步介绍。
几何重建的一个很重要的背景是,我们往往不需要追求十分精确的深度位置。比如,人对三维的感知其实都是非常不准的,它的精确度取决于你当前要执行的任务。在执行的过程中,你不断地根据需要来提高精度。比如,你要去拿几米以外的一个杯子,一开始你对杯子的方位只是一个大致的估计,在你走近、伸手的过程中逐步调整精度。

这就回到上一节谈的问题,不同任务对几何与识别的精度要求不一样。这是人脑计算非常高效的一个重要原因。最近,我以前一个博士后刘晓白(现在是助理教授)和我其他学生在这方面取得了很好进展,具体可以查看他们相关文章。
二、场景识别的本质是功能推理。现在很多学者做场景的分类和分割都是用一些图像特征,用大量的图片例子和手工标注的结果去训练神经网络模型---这是典型的“鹦鹉”模式。而一个场景的定义本质上就是功能。当你看到一个三维空间之后,人脑很快就可以想象我可以干什么:这个地方倒水,这里可以拿杯子,这里可以坐着看电视等。现代的设计往往是复合的空间,就是一个房间可以多种功能,所以简单去分类已经不合适了。比如,美式厨房可以做饭、洗菜、用餐、聊天、吃饭。卧室可以睡觉、梳妆、放衣服、看书。场景的定义是按照你在里面能够干什么,这个场景就是个什么,按照功能划分,这些动作都是你想象出来的,实际图像中并没有。人脑感知的识别区与运动规划区是直接互通的,相互影响。我的博士学生赵一彪就是做这个的,他毕业去了MIT做认知科学博后,现在创立了一家自动驾驶的AI公司。
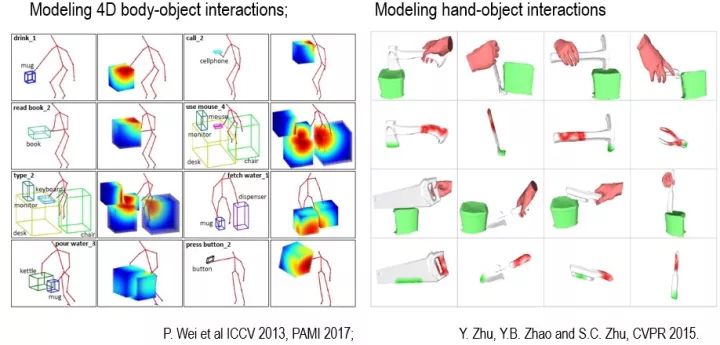
为了想象这些功能,人脑有十分丰富的动作模型,这些动作根据尺度分为两类(见下图)。第一类(左图)是与整个身体相关的动作,如坐、站、睡觉、工作等等;第二类(右图)是与手的动作相关的,如砸、剁、锯、撬等等。这些四维基本模型(三维空间加一维时间)可以通过日常活动记录下来,表达了人的动作和家具之间,以及手和工具之间的关系。正因为这一点,心理学研究发现我们将物体分成两大类,分别存放在脑皮层不同区域:一类是跟手的大小有关,跟手的动作相关的,如你桌上的东西;另一类是跟身体有关,例如家具之类。
有了这个理解,我们就知道:下面两张图,虽然图像特征完全不同,但是他们是同一类场景,功能上是等价的。人的活动和行为,不管你是哪个国家、哪个历史时期,基本是不变的。这是智能泛化的基础,也就是把你放到一个新的地区,你不需要大数据训练,马上就能理解、适应。这是我们能够举一反三的一个基础。

回到前面的那个STC-PG解译图,每个场景底下其实就分解成为一些动作和功能(见STC-PG图中的绿色方片节点)。由计算机想象、推理的各种功能决定对场景的分类。想象功能就是把人的各种姿态放到三维场景中去拟合(见厨房解译图中人体线画)。这是完全不同于当前的深度学习方法用的分类方法。
三、物理稳定性与关系的推理。我们的生活空间除了满足人类的各种需求(功能、任务)之外,另一个基本约束就是物理。我们对图像的解释和理解被表达成为一个解译图,这个解译图必须满足物理规律,否则就是错误的。比如稳定性是人可以快速感知的,如果你发现周围东西不稳,要倒了,你反应非常快,赶紧闪开。最近我们项目组的耶鲁大学教授BrianScholl的认知实验发现,人对物理稳定性的反应是毫秒级,第一反应时间大约100ms。
我们对图像的理解包含了物体之间的物理关系,每个物体的支撑点在那里。比如,下面这个图,吊灯和墙上挂的东西,如果没有支撑点,就会掉下来(右图)。这个研究方向,MIT认知科学系的JoshTenenbuam教授与我都做了多年。
我提出了一个新的场景理解的minimax标准:minimizeinstabilityandmaximizefunctionality最小化不稳定性且最大化功能性。这比以前我们做图像理解的用的MDL(最小描述长度)标准要更靠谱。这是解决计算机视觉的基本原理,功能和物理是设计场景的基本原则。几何尺寸是附属于功能推出来的,比如椅子的高度就是因为你要坐得舒服,所以就是你小腿的长度。
回到我家厨房的例子,你就会问,那里面的水是如何被检测到的呢?水是看不见的,花瓶和水壶里的水由各种方式推出来的。另外,你可能注意到,桌上的番茄酱瓶子是倒立着,为什么呢?你可能很清楚,你家的洗头膏快用完的时候,瓶子是不是也是的倒着放的呢?这就是对粘稠液体的物理和功能理解之后的结果。由此,你可以看到我们对一个场景的理解是何等“深刻”,远远超过了用深度学习来做的物体分类和检测。
四、意向、注意和预测。厨房那张图有一个人和一只狗,我们可以进一步识别其动作、眼睛注视的地方,由此推导其动机和意向。这样我们可以计算她在干什么、想干什么,比如说她现在是渴了,还是累了。通过时间累积之后,进而知道她知道哪些,也就是她看到了或者没有看到什么。在时间上做预测,她下面想干什么。只有把这些都计算出来了,机器才能更好地与人进行交互。
所以,虽然我们只看到一张图片,那张STC-PG中,我们增加了时间维度,对人和动物的之前和之后的动作,做一个层次的分析和预测。当机器人能够预判别人的意图和下面的动作,那么它才能和人进行互动和合作。后面,我们讲的语言对话可以帮助人机互动和合作;但是,我们日常很多交互协助,靠的是默契,不需要言语也能做不少事。
下面的这一张图,是多摄像机的一个综合场景的解译实例。这是我的实验室做出来的一个视觉系统。这个视频的理解就输出为一个大的综合的STC-PG。在此基础上,就可以输出文字的描述(I2T)和回答提问QA。我们把它叫做视觉图灵测试,网址:visualturingtest.com。
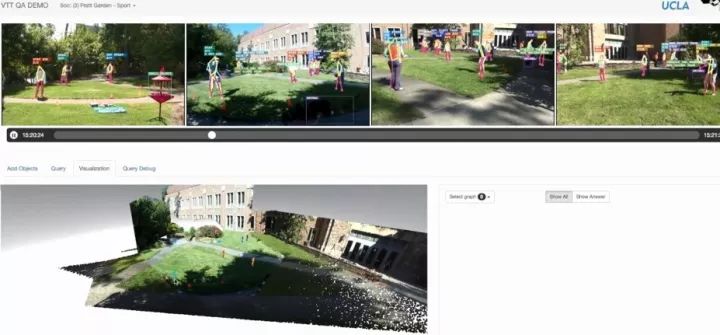
与第一节讲的机器人竞赛类似,这也是一个DARPA项目。测试就是用大量视频,我们算出场景和人的三维的模型、动作、属性、关系等等,然后就来回答各种各样的1000多个问题。现在一帮计算机视觉的人研究VQA(视觉问答),就是拿大量的图像和文本一起训练,这是典型的“鹦鹉”系统,基本都是“扯白”。回答的文字没有真正理解图像的内容,常常逻辑不通。我们这个工作是在VQA之前,认真做了多年。我们系统在项目DARPA测试中领先,当时其它团队根本无法完成这项任务。可是,现在科研的一个现实是走向“娱乐化”:肤浅的歌曲流行,大家都能唱,复杂高深的东西大家躲着走。
既然说到这里,我就顺便说说一些竞赛的事情。大约从2008年开始,CVPR会议的风气就被人“带到沟里”了,组织各种数据集竞赛,不谈理解了,就是数字挂帅。中国很多学生和团队就开始参与,俗称“刷榜”。我那个时候跟那些组织数据集的人说(其实我自己2005年是最早在湖北莲花山做大型数据标注的,但我一早就看到这个问题,不鼓励刷榜),你们这些比赛前几名肯定是中国学生或者公司。现在果然应验了,大部分榜上前几名都是中国人名字或单位了。咱们刷榜比打乒乓球还厉害,刷榜变成咱们AI研究的“国球”。所谓刷榜,一般是下载了人家的代码,改进、调整、搭建更大模块,这样速度快。我曾经访问一家技术很牛的中国公司(不是搞视觉的),那个公司的研发主管非常骄傲,说他们刷榜总是赢,美国一流大学都不在话下。我听得不耐烦了,我说人家就是两个学生在那里弄,你们这么大个团队在这里刷,你代码里面基本没有算法是你自己的。如果人家之前不公布代码,你们根本没法玩。很多公司就拿这种刷榜的结果宣传自己超过了世界一流水平。
五、任务驱动的因果推理与学习。前面我谈了场景的理解的例子,下面我谈一下物体的识别和理解,以及为什么我们不需要大数据的学习模式,而是靠举一反三的能力。
我们人是非常功利的社会动物,就是说做什么事情都是被任务所驱动的。这一点,2000年前的司马迁就已经远在西方功利哲学之前看到了(《史记》“货殖列传”):“天下熙熙,皆为利来;天下攘攘,皆为利往。”那么,人也就带着功利的目的来看待这个世界,这叫做“teleologicalstance”。这个物体是用来干什么的?它对我有什么用?怎么用?
当然,有没有用是相对于我们手头的任务来决定的。很多东西,当你用不上的时候,往往视而不见;一旦要急用,你就会当个宝。俗话叫做“势利眼”,没办法,这是人性!你今天干什么、明天干什么,每时每刻都有任务。俗话又叫做“屁股决定脑袋”,一个官员坐在不同位置,他就有不同的任务与思路,位置一调,马上就“物是人非”了。
我们的知识是根据我们的任务来组织的。那么什么叫做任务呢?如何表达成数学描述呢?
每个任务其实是在改变场景中的某些物体的状态。牛顿发明了一个词,在这里被借用了:叫做fluent。这个词还没被翻译到中文,就是一种可以改变的状态,我暂且翻译为“流态”吧。比如,把水烧开,水温就是一个流态;番茄酱与瓶子的空间位置关系是一个流态,可以被挤出来;还有一些流态是人的生物状态,比如饿、累、喜悦、悲痛;或者社会关系:从一般人,到朋友、再到密友等。人类和动物忙忙碌碌,都是在改变各种流态,以提高我们的价值函数(利益)。
懂得这一点,我们再来谈理解图像中的三维场景和人的动作。其实,这就是因果关系的推理。所谓因果就是:人的动作导致了某种流态的改变。理解图像其实与侦探(福尔摩斯)破案一样,他需要的数据往往就是很小的蛛丝马迹,但是,他能看到这些蛛丝马迹,而普通没有受侦探训练的人就看不见。那么,如何才能看到这些蛛丝马迹呢?其一、你需要大量的知识,这个知识来源于图像之外,是你想象的过程中用到的,比如一个头发怎么掉在这里的?还有就是行为的动机目的,犯案人员到底想改变什么“流态”?
我把这些图像之外的东西统称为“暗物质”---DarkMatter。物理学家认为我们可观察的物质和能量只是占宇宙总体的5%,剩下的95%是观察不到的暗物质和暗能量。视觉与此十分相似:感知的图像往往只占5%,提供一些蛛丝马迹;而后面的95%,包括功能、物理、因果、动机等等是要靠人的想象和推理过程来完成的。
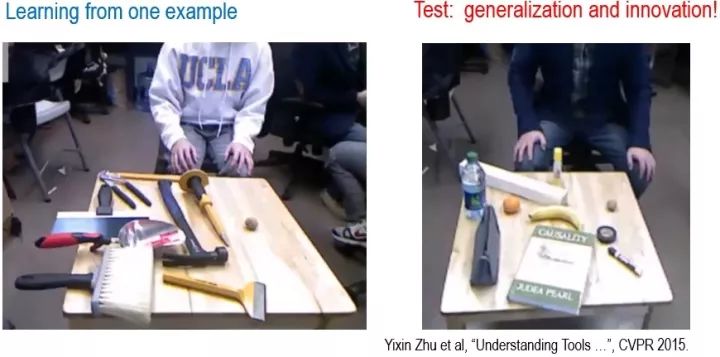 有了这个认识,我们来看一个例子(见下图左)。这个例子来自我们CVPR2015年发的paper,主要作者是朱毅鑫,这也是我很喜欢的一个工作。一个人要完成的任务是砸核桃,改变桌子上那个核桃的流态。把这个任务交给UCLA一个学生,他从桌面上的工具里面选择了一个锤子,整个过程没有任何过人之处,因为你也会这么做。
有了这个认识,我们来看一个例子(见下图左)。这个例子来自我们CVPR2015年发的paper,主要作者是朱毅鑫,这也是我很喜欢的一个工作。一个人要完成的任务是砸核桃,改变桌子上那个核桃的流态。把这个任务交给UCLA一个学生,他从桌面上的工具里面选择了一个锤子,整个过程没有任何过人之处,因为你也会这么做。
不过你细想一下,这个问题还相当复杂。这个动作就包含了很多信息:他为什么选这个锤子而不选别的东西,他为什么拿着锤这个柄靠后的位置?他挥动的力度用多少,这都是经过计算的。这还有几千几万的可能其他各种选择、解法,他没有选择,说明他这个选法比其它的选择肯定会好,好在哪呢?看似简单的问题,往往很关键,一般人往往忽略了。
你通过这一琢磨、一对比就领悟到这个任务是什么,有什么窍门。以前学徒就是跟着师傅学,师傅经常在做任务,徒弟就看着,师傅也不教,徒弟就靠自己领悟。有时候师傅还要留一手,不然你早早出师了,抢他的饭碗。有时候师傅挡着不让你看;莫言的小说就有这样的情节。人就是在观察的时候,把这个任务学会了。
现在到一个新的场景(图右),原来学习的那些工具都不存在了,完全是新的场景和物体,任务保持不变。你再来砸这个核桃试试看,怎么办?人当然没有问题,选这个木头做的桌子腿,然后砸的动作也不一样。这才是举一反三,这才是智能,这没有什么其他数据,没有大量数据训练,这不是深度学习方法。
那这个算法怎么做的呢?我们把对这个物理空间、动作、因果的理解还是表达成为一个Spatial,TemporalandCausalParseGraph(STC-PG)。这个STC-PG包含了你对空间的理解(物体、三维形状、材质等)、时间上动作的规划、因果的推理。最好是这样子砸,它物理因果能够实现,可能会被砸开,再连在一块来求解,求时间、空间和因果的这么一个解析图,就是一个解。也就是,最后你达到目的,改变了某种物理的流态。
我再强调几点:
一、这个STC-PG的表达是你想象出来的。这个理解的过程是在你动手之前就想好了的,它里面的节点和边大多数在图像中是没有的,也就是我称作的“暗物质”。
二、这个计算的过程中,大量的运算属于“top-down”自顶向下的计算过程。也就是用你脑皮层里面学习到的大量的知识来解释你看到的“蛛丝马迹”,形成一个合理的解。而这种Top-down的计算过程在目前的深度多层神经网络中是没有的。神经网络只有feedforward向上逐层传播信息。你可能要说了,那不是有Back-propagation吗?那不是top-down。一年前,LeCun来UCLA做讲座,他看到我在座,就说DNN目前缺乏朱教授一直提倡的Top-Down计算进程。
三、学习这个任务只需要极少的几个例子。如果一个人要太多的例子,说明Ta脑袋“不开窍”,智商不够。顺便说一句,我在UCLA讲课,期末学生会给老师评估教学质量。一个常见的学生意见就是朱教授给的例子太少了。对不起,我没时间给你上课讲那么多例子,靠做题、题海训练,那不是真本事,也不是学习的本质。子曰:“学而不思则罔,思而不学则殆”。这里的“思”应该是推理,对于自然界或者社会的现象、行为和任务,形成一个符合规律的自洽的解释,在我看来就是一个STC-PG。
那么STC-PG是如何推导出来的呢?它的母板是一个STC-AOG,AOG就是And-OrGraph与或图。这个与或图是一个复杂的概率语法图模型,它可以导出巨量的合乎规则的概率事件,每一个事件就是STC-PG。这个表达与语言、认知、机器人等领域是一致的。在我看来,这个STC-AOG是一个统一表达,它与逻辑以及DNN可以打通关节。这里就不多讲了。
接着砸核桃的例子讲,还是朱毅鑫那篇文章的实验,这个实验很难做。比如现在的一个任务是“铲土”,我给你一个例子什么叫铲土,然后开始测试这个智能算法(机器人)的泛化能力。见下图。

第一组实验(图左)。我给你一些工具,让你铲土,机器人第一选择挑了这个铲子,这个不是模式识别,它同时输出用这个铲子的动作、速度;输出铲子柄的绿色地方表示它要手握的地方,这个红的表示它用来铲土的位置。第二选择是一把刷子。
第二组实验(图中)。假如我要把这些工具拿走,你现在用一些家里常见的物体,任务还是铲土。它的第一选择是锅,第二选择是杯子。二者的确都是最佳选择。这是计算机视觉做出来的,自动的。
第三组实验(图右)。假如我们回到石器时代,一堆石头能干什么事情?所以我经常说,咱们石器时代的祖先,比现在的小孩聪明。因为他们能够理解这个世界的本质,现在,工具和物体越来越特定了,一个工具做一个任务,人都变成越来越傻了。视觉认知就退化成模式识别的问题了:从原来工具的理解变成一个模式识别。也就是由乌鸦变鹦鹉了。
计算机视觉小结:我简短总结一下视觉的历史。见下图。
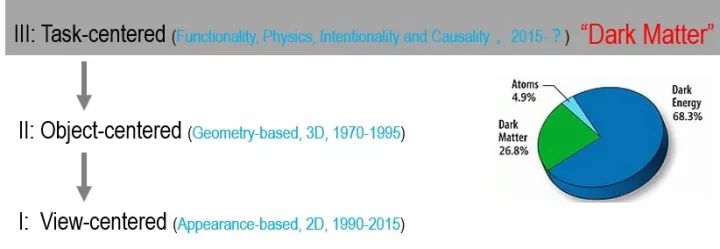
视觉研究前面25年的主流是做几何,以形状和物体为中心的研究:Geometry-BasedandObject-Centered。最近25年是从图像视角通过提取丰富的图像特征描述物体的外观来做识别、分类:Appearance-BasedandView-Centered。几何当然决定表观。那么几何后面深处原因是什么呢?几何形状的设计是因为有任务,最顶层是有任务,然后考虑到功能、物理、因果,设计了这些物体再来产生图像,这是核心问题所在。我把在当前图像是看不见的“东西”叫darkmatter。物理里面darkmatterenergy占95%,确确实实在我们智能里面darkmatter也占了大部分。而你看到的东西就是现在深度学习能够解决的,比如说人脸识别、语音识别,就是很小的一部分看得见的东西;看不见的在后面,才是我们真正的智能,像那个乌鸦能做到的。
所以,我的一个理念是:计算机视觉要继续发展,必须发掘这些“darkmatter”。把图像中想象的95%的暗物质与图像中可见的5%的蛛丝马迹,结合起来思考,才能到达真正的理解。现在大家都喜欢在自己工作前面加一个Deep,以为这样就算深刻了、深沉了,但其实还是非常肤浅的。不管你多深,不管你卷积神经网络多少层,它只是处理可见的图像表观特征、语音特征,没有跳出那5%,对吧?那些认为深度学习解决了计算机视觉的同学,我说服你了么?如果没有,后面还有更多的内容。
视觉研究的未来,我用一句话来说:GoDark,BeyondDeep---发掘暗,超越深。
这样一来,视觉就跟认知和语言接轨了。
第六节认知推理:走进内心世界
上一节讲到的智能的暗物质,已经属于感知与认知的结合了。再往里面走一步,就进入人与动物的内心世界Mind,内心世界反映外部世界,同时受到动机任务的影响和扭曲。研究内涵包括:
Ta看到什么了?知道什么了?什么时候知道的?这其实是对视觉的历史时间求积分。
Ta现在在关注什么?这是当前的正在执行的任务。
Ta的意图是什么?后面想干什么?预判未来的目的和动机。
Ta喜欢什么?有什么价值函数?这在第九节会谈到具体例子。
自从人工智能一开始,研究者就提出这些问题,代表人物是Minsky:societyofminds,心理学研究叫做Theoryofminds。到2006年的时候,MIT认知科学系的Saxe与Kanwisher(她是我一个项目合作者)发现人的大脑皮层有一个专门的区,用于感受、推理到别人的想法:我知道你在想什么、干什么。这是人工智能的重要部分。
说个通俗的例子,你可能听到过这样的社会新闻:某男能够同时与几个女朋友维持关系,而且不被对方发现,就是他那几个女朋友互相不知情。这其实很难做到,因为你一不小心就要暴露了。他需要记住跟谁说过什么谎话、做过或者答应过什么事。这种人的这个脑皮层区一定是特别发达,而他的那些女朋友的这个区可能不那么发达。电影中的间谍需要特别训练这方面的“反侦察”能力,就是你尽量不让对方发现你的内心。这是极端状况。现实生活中,一般非隐私性的活动中,我们是不设防的,也就是“君子坦荡荡”。

不光是人有这个侦察与反侦察的能力,动物也有(见上图)。比如说这个鸟(图左),它藏果子的时候,会查看周围是否有其它鸟或者动物在那里看到它;如果有,它就不藏,它非要找到没人看它的时候和地方藏。这就是它在观察你,知道你知道什么。图中是一个狐狸和水獭对峙的视频。水獭抓到鱼了以后,发现这个狐狸在岸上盯着它呢,它知道这个狐狸想抢它嘴里叼着的鱼。水獭就想办法把鱼藏起来,它把这个鱼藏到水底下,然后这个狐狸去找。这说明了动物之间互相知道对方在想什么。
小孩从一岁多的时候开始就有了这个意识。一个关键反应证据是:他会指东西给你看,你看到了、还是没看到的,他会知道。FelixWarneken现在在哈佛大学当心理学系的助理教授。他当博士生的时候做过一系列心理实验。一般一岁多的小孩能知道给你开门,小孩很乐意、主动去帮忙。小孩很早就知道跟人进行配合,这就是人机交互。你把这个小孩看成一个机器人的话,你要设计一个机器人,就是希望它知道看你想干什么,这是人工智能的一个核心表现。
尽管人工智能和认知科学,以及最近机器人领域的人都对这个问题感兴趣,但是,大家以前还都是嘴上、纸上谈兵,用的是一些toyexamples作为例子来分析。要做真实世界的研究,就需要从计算机视觉入手。计算机视觉里面的人呢,又大部分都在忙着刷榜,一时半会还没意思到这是个问题。我的实验室就捷足先登,做了一些初步的探索,目前还在积极推进之中。

我们首先做一个简单的试验,如上图。这个人在厨房里,当前正在用微波炉。有一个摄像头在看着他,就跟监控一样,也可以是机器人的眼睛(图左)。首先能够看到他目前在看什么(图中),然后,转换视角,推算他目前看到了什么(图右)。
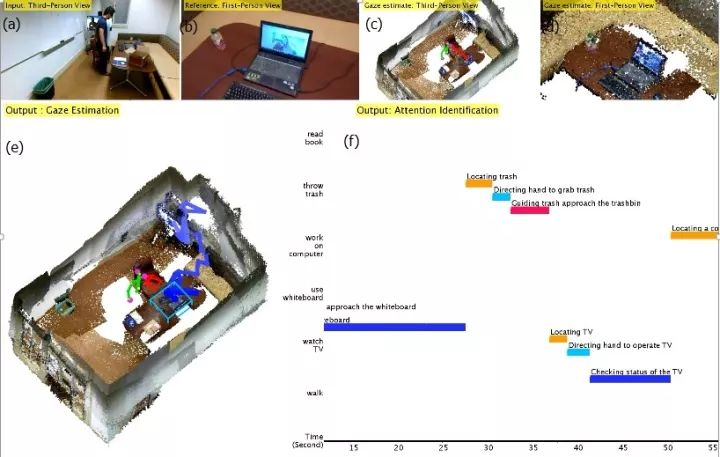
上面这个图是实验的视频的截图。假设机器人事先已经熟悉某个三维房间(图e),它在观察一个人在房间里面做事(图a)。为了方便理解,咱们就想象这是一个养老院或者医院病房,机器人需要知道这个人现在在干什么,看什么(图c)。它的输入仅仅是一个二维的视频(图a)。它开始跟踪这个人的运动轨迹和眼睛注视的地方,显示在图e的那些轨迹和图f的行为分类。然后,图d(右上角)是它估算出来的,这个人应该在看什么的图片。也就是,它把它附体到这个人身上,来感知。这个结果与图b对比,非常吻合。图b是这个人带一个眼镜,眼镜有一个小摄像头记录下来的,他确实在看的东西。这个实验结果是魏平博士提供的,他是西交大前校长郑南宁老师那里的一个青年教师,博士期间在我实验室访问,后来又回来进修。
这里面需要推测动作与物体的时空交互,动作随时间的转换,手眼协调。然后,进一步猜他下面干什么,意图等等。这个细节我不多讲了。
对这个人内心的状态,也可以用一个STC-AOG和STC-PG来表达的,见下图,大致包含四部分。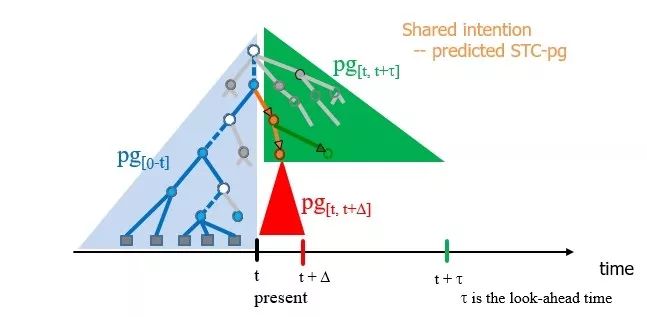

一、时空因果的概率“与或图”,STC-AOG。它是这个人的一个总的知识,包含了所有的可能性,我待会儿会进一步阐述这个问题。剩下的是他对当前时空的一个表达,是一个STC-PG解译图。此解译图包含三部分,图中表达为三个三角形,每个三角形也是一个STC-PG解译图。
二、当前的情景situation,由上图的蓝色三角形表示。当前的情况是什么,这也是一个解,表示视觉在0-t时间段之间对这个场景的理解的一个解译图。
三、意向与动作规划图,由上图的绿色三角形表示。这也是一个层次化的解译图,预判他下面还会做什么事情,
四、当前的注意力,由上图的红色三角形表示。描述他正在关注什么。
把这整个解译图放在一块,基本上代表着我们脑袋的过去、现在、未来的短暂时间内的状态。用一个统一的STC-PG和STC-AOG来解释。这是一个层次的分解。因为是Composition,它需要的样本就很少。
有人要说了,我的深度神经网络也有层次,还一百多层呢。我要说的是,你那一百多层其实就只有一层,对不对?因为你从特征做这个识别,中间的东西是什么你不知道,他不能去解释中间那些过程,只有最后一层输出物体类别。
上面说的这个表达,是机器人对某个人内心状态的一个估计,这个估计有一个后验概率,这个估计不是唯一的,存在不确定性。而且,它肯定不是真相。不同的人观察某个人,可能估计都不一样。那么在一个机器与人共生共存的环境中,假设这个场景里有N个机器人或者人,这里面有很多N个“自我”minds。然后,每个人有对别人有一个估计,这就有Nx(N-1)个minds表达。我知道你在想什么,你知道我在想什么,这至少是平方级的。你有一百个朋友的话,哪个朋友他脑袋里想什么你心里都有数。关系越近,理解也就越深,越准确。
当然,我们这里只是做一阶推理,在复杂、对抗的环境中,人们不得不用多阶的表达。当年司马懿和诸葛亮在祁山对峙时,诸葛亮比司马懿总是要多算一阶。所谓兵不厌诈,就是有时候我故意把一个错误信息传给你,《三国演义》中很多此类的精彩故事,比如周瑜打黄盖、蒋干盗书。
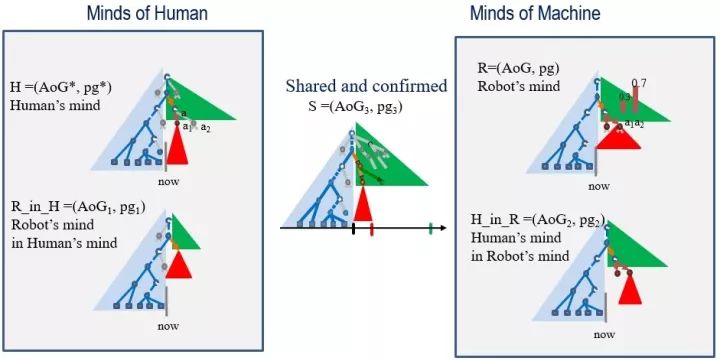
我用下面这个图来大致总结一下。两个人A与B或者一个人一个机器人,他们脑袋里面的表达模式。图中是一个嵌套的递归结构,每一个椭圆代表一个大脑的内心mind。

每个mind除了上面谈到的知识STC-AOG和状态STC-PG,还包含了价值函数,就是价值观,和决策函数。价值观驱动动作,然后根据感知、行动去改变世界,这样因果就出来了。我后面再细谈这个问题。
最底下中间的那个椭圆代表真实世界(“上帝”的mind,真相只有TA知道,我们都不知道),上面中间的那个椭圆是共识。多个人的话就是社会共识。在感知基础上,大家形成一个统一的东西,共同理解,我们达成共识。比如,大家一起吃饭,菜上来了,大家都看到这个菜是什么菜,如果没有共识那没法弄。比如,“指鹿为马”或者“皇帝的新装”,就是在这些minds之间出现了不一致的东西。这是所谓“认识论”里面的问题。以前,在大学学习认识论,老师讲得比较空泛,很难理解;现在你把表达写出来,一切都清楚了。这也是人工智能必须解决的问题。
我们要达成共识,共同的知识,然后在一个小的团体、大致社会达成共同的价值观。当有了共同价值观的时候,就有社会道德和伦理规范,这都可以推导出来了。俗话说,入乡随俗。当你加入一个新的团体或者社交群体,你可能先观察看看大家都是怎么做事说话的。机器人要与人共生共存必须理解人的团体的社会道德和伦理规范。所以说,这个认识论是机器人发展的必经之道。乌鸦知道人类在干什么,它才能够利用这个在社会里生存。
那么如何达成共识呢?语言就是必要的形成共识的工具了。
第七节语言通讯:沟通的认知基础
我要介绍的人工智能的第三个领域是语言、对话。最近我两次在视觉与语言结合的研讨会上做了报告,从我自己观察的角度来谈,视觉与语言是密不可分的。
人类的语言中枢是独特的,有趣的是它在运动规划区的附近。我们为什么要对话呢?语言的起源就是要把一个人脑袋(mind)的一个信息表达传给你一个人,这就包括上一节讲的知识、注意、意向计划,归纳为图中那三个三角形的表达。希望通过对话形成共识,形成共同的任务规划,就是我们一致行动。所以,语言产生的基础是人要寻求合作。
动物之间就已经有丰富的交流的方式,很多借助于肢体语言。人的对话不一定用语言,手语、哑剧(pantomine)同样可以传递很多信息。所以,在语言产生之前,人类就已经有了十分丰富的认知基础,也就是上一节谈的那些表达。没有这样的认知基础,语言是空洞的符号,对话也不可能发生。
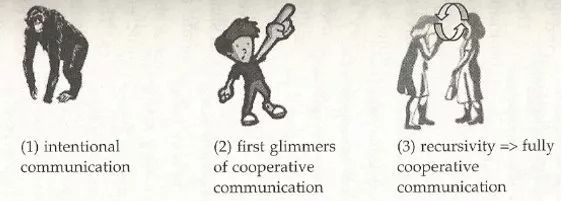
发育心理学实验表明,12个月的小孩就可以知道去指东西,更小年龄就不会,但是很多动物永远达不到这个水平。举个例子,有人做了个实验。一群大猩猩坐在动物园里,一个猩猩妈妈带一个小猩猩,玩着玩着小猩猩跑不见了,然后这个妈妈去找。周围一大堆闲着的猩猩坐在那里晒太阳,它们明明知道那个小猩猩去哪了。如果是人的话,我们就会热心地指那个小孩的方向,人天生是合作的,去帮助别人的,助人为乐,所以这是为什么我们人进化出来了。猩猩不会,猩猩不指,它们没有这个动机,它们脑袋与人相比一定是缺了一块。人和动物相比,我们之所以能够比他们更高级,因为脑袋里有很多通信的认知构架(就像多层网络通讯协议)在大脑皮层里面,没有这些认知构架就没法通信。研究语言的人不去研究底下的认知构架,那是不会有很大出息的。下面这个图来源于人类学的研究的一个领军人物MichaelTomasello。
除了需要这个认知基础,语言的研究不能脱离了视觉对外部世界的感知、机器人运动的因果推理,否则语言就是无源之水、无本之木。这也就是为什么当前一些聊天机器人都在“扯白”。
我们先来看一个最基本的的过程:信息的一次发送。当某甲(sender)要发送一条消息给某乙(receiver),这是一个简单的通讯communication。这个通讯的数学模型是当年贝尔实验室香农Shannon1948年提出来的信息论。首先把它编码,因为这样送起来比较短,比较快;针对噪声通道,加些冗余码防错;然后解码,某乙就拿到了这个信息。见下图。 在这个通讯过程之中他有两个基本的假设。第一、这两边共享一个码本,否则你没法解码,这是一个基本假设。第二、就是我们有个共享的外部世界的知识在里面,我们都知道世界上正在发生什么什么事件,比如哪个股票明天要涨了,哪个地方要发生什么战争了等等。我给你传过去的这个信息其实是一个解译图的片段(PG:parsegraph)。这个解译图的片段对于我们物理世界的一个状态或者可能发生的状态的描述。这个状态也有可能就是我脑袋Mind里面的一个想法、感觉、流态(fluents)。比如,很多女人拿起电话,叫做“煲粥”,就在交流内心的一些经历和感受。
在这个通讯过程之中他有两个基本的假设。第一、这两边共享一个码本,否则你没法解码,这是一个基本假设。第二、就是我们有个共享的外部世界的知识在里面,我们都知道世界上正在发生什么什么事件,比如哪个股票明天要涨了,哪个地方要发生什么战争了等等。我给你传过去的这个信息其实是一个解译图的片段(PG:parsegraph)。这个解译图的片段对于我们物理世界的一个状态或者可能发生的状态的描述。这个状态也有可能就是我脑袋Mind里面的一个想法、感觉、流态(fluents)。比如,很多女人拿起电话,叫做“煲粥”,就在交流内心的一些经历和感受。
如果没有这个共同的外部世界,那我根本就不知道你在说什么。比如外国人聚在一起讲一个笑话,我们可能听不懂。我们中国人说“林黛玉”,那是非常丰富的一个文化符号,我们都明白谁是林黛玉,她的身世、情感、性格和价值观,就轮到外国人听不懂了。
Shannon的通讯理论只关心码本的建立(比如视频编解码)和通讯带宽(3G,4G,5G)。1948年提出信息论后,尽管有很多聪明人、数学根底很强的人进到这个领域,这个领域一直没有什么大的突破。为什么?因为他们忽视了几个更重大的认识论的问题,避而不谈:
甲应该要想一下:乙脑袋里面是否与甲有一个共同的世界模型?否则,解码之后,乙也不能领会里面的内容?或者会误解。那么我发这个信息的时候,措辞要尽量减少这样的误解。
甲还应该要想一下:为什么要发这个信息?乙是不是已经知道了,乙关不关注这个信息呢?乙爱不爱听呢?听后有什么反应?这一句话说出去有什么后果呢?
乙要想一下:我为什么要收这个信息呢?你发给我是什么意图?
这是在认知层面的,递归循环的认知,在编码之外。所以,通讯理论就只管发送,就像以前电报大楼的发报员,收钱发报,他们不管你发报的动机、内容和后果。
纵观人类语言,中国的象形文字实在了不起。所谓象形文字就完全是“明码通讯”。每个字就是外部世界的一个图片、你一看就明白了,不需要编解码。我觉得研究自然语言的人和研究视觉统计建模的人,都要好好看看中国的甲骨文,然后,所有的事情都清楚了。每个甲骨文字就是一张图,图是什么?代表的就是一个解译图的片段(fragmentofparsegraph)。
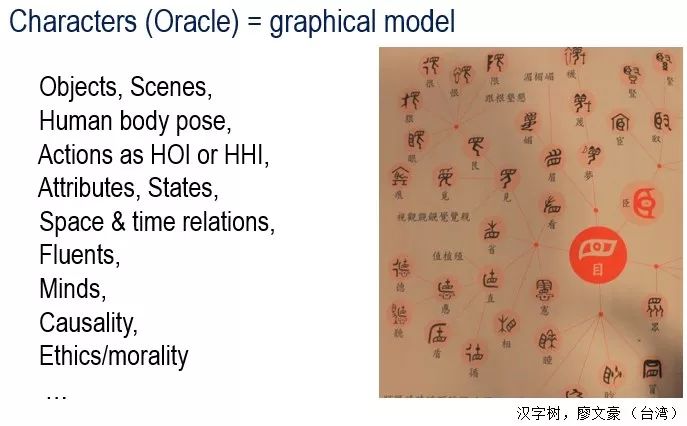
上面这个图是一个汉字的演变和关系图,从一本书叫做《汉字树》得来的。几年前,我到台湾访问,发现这本丛书,很有意思。这个图是从眼睛开始的一系列文字。
首先从具象的东西开始,这中间是一个眼睛,“目”字,把手搭在眼睛上面,孙悟空经常有这个动作,就是“看”(look)。
然后是会意,比如“省”,就是细看,明察秋毫,画一个很小的叶子在眼睛上面,指示说你看叶子里面的东西,表示你要细看。
然后开始表达抽象的概念,属性attribute、时空怎么表达,就是我们甲骨文里面,表示出发、终止,表示人的关系,人的脑袋状态,甚至表现伦理道德。就这样,一直推演开。
所以,搞视觉认知的,要理解物体功能就要追溯到石器时代去,搞语言的要追溯到语言起源。
下图是另一个例子:日、月、山、水、木;鸟、鸡、鱼、象、羊。下面彩色的图是我们实验室现在用计算机视觉技术从图像中得到的一些物体的表达图模型,其实就重新发明一些更具像的甲骨文。这项技术是由YiHong,司长长等博士做的无监督学习。他们的算法发现了代表鸟的有头、身子和脚、水波和水草等“类甲骨文”名词符号。这种视觉的表达模型是可解释explainable、直观的。
所以,从生成式模型的角度来看,语言就是视觉,视觉就是语言。

再来看看动词。考考你们,这是啥意思?第一个字,两只手,一根绳子,在拖地上一个东西,拿根绳子拽。第二个很简单,洗手。第三是关门。第四是援助的援字,一只手把另外一个人的手往上拉。第五也是两个手,一个手朝下一个手朝上,啥意思?我给你东西,你接受。第六是争夺的争,两个手往相反的方向抢。第七两个人在聊天。基本上,字已经表示了人和人之间的动作细节。

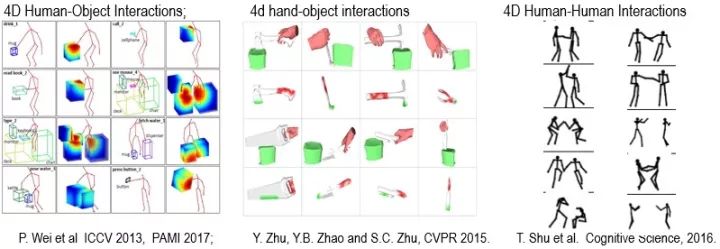
现在我的实验室里,计算机也能自动学出“类甲骨文”的动词的表达,见下图。我们学出来的这些两个人交互的动作包括:坐、玩手机、握手、人拉人等等。我们把这些动作模型分别叫做4DHOI(4DHuman-ObjectInteraction)、4Dhoi(4Dhand-objectinteraction)、4DHHI(4DHuman-HumanInteraction)。
我刚才说了名词和动词,还有很多其他的东西,我建议你们去研究一下,要建模型的话我们古代的甲骨文其实就是一个模型,他能够把我们世界上所有需要表达的东西都给你表达了,是一个完备了的语言模型。
我再举个复杂和抽象的例子,咱们古代人怎么定义伦理道德,非常的漂亮!
引言中谈到,大家担心机器人进入社会以后,是不是会危害人类生存,所以引发了很多讨论。有一次我参加一个DARPA内部会议,会议邀请了各界教授们讨论这个问题,他们来自社会伦理学、认知科学、人工智能等学科。大家莫衷一是。轮到我做报告,我就说,其实这个问题,中国古代人的智慧就已经想清楚了。
伦理道德的“德”字怎么定义的?什么叫道德?
道德规范是什么,它是个相对的定义,随着时间和人群而变化。我刚来美国的时候,美国社会不许堕胎、不许同性恋,现在都可以了。中国以前妇女都不许改嫁。甚至到几十年前,我在家乡都听说这样的规矩:如果一个妇女在路上,她的影子投到一个长老身上,那是大不敬,所以走路必须绕开,这就是一种社会规范。

中文这个“德”字你看左边是双人旁,双人旁其实不是两个人,双人旁在甲骨文画的是十字路口(见最右边那个图),十字路口就是说你是要做个选择,是个决策。你怎么选择?比如说一个老人倒在地上,你是扶他还是不扶他?这就是一个选择。贪不贪污、受不受贿这都是内心的一个选择。这个选择是你心里面做出的,所以下面有个心字。
那怎么判断你内心的选择符不符合道德呢?社会不可能把大量规则逐条列出来,一个汉字也没法表达那么多的内容吧。“德”字上面是一个十字,十字下面一个四,其实不是四,而是眼睛,十个眼睛看着你。就是由群众来评判的。这就相当于西方的陪审团,陪审团都是普通民众中挑选出来的(那是更进一层的法律规范了)。他们如果觉得你做的事情能够接受就是道德,如果不接受那就是不道德。所以,你在做选择的时候,必须考虑周围人的看法,人家脑袋里会怎么想,才决定这个东西做不做。
所以,如果没有上一节讲的认知基础,也就是你如果不能推断别人的思想,那就无法知道道德伦理。研究机器人的一个很重要的一个问题是:机器要去做的事情它不知道该不该做。那么它首先想一下(就相当于棋盘推演simulation):我如何做这个事情,人会有什么反应,如果反应好就做,如果反应不好就不做,就这么一个规则。以不变应万变。
那它怎么知道你怎么想的呢?它必须先了解你,你喜欢什么、厌恶什么。每个人都不一样,你在不同的群体里面,哪些话该说,哪些话不该说,大家心里都知道,这才是交互,你没有这方面知识你怎么交互呢?
所以我还是觉得我们古代的人很有智慧,比我们现在的人想的深刻的多,一个字就把一个问题说得很精辟。咱们现在大部分人不想问题,因为你不需要想问题了,大量媒体、广告到处都是,时时刻刻吸引你的眼球,你光看都看不过来,还想个什么呢!只要娱乐就好了。
现在,我们回到语言通讯、人与机器人对话的问题。下图就是我提出的一个认知模型。
两个人之间至少要表达五个脑袋minds:我知道的东西、你知道的东西、我知道你知道的东西、你知道我知道的东西、我们共同知道的东西。还有,对话的时候你的意图是什么等等诸多问题。具体我不讲那么多了。
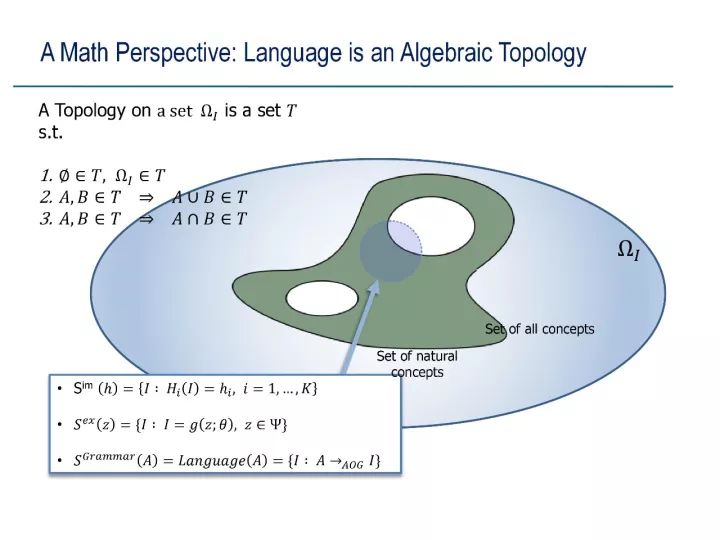 最后,我想谈一点,语言与视觉更深层的联系、与数学中代数拓扑的联系。拓扑学是什么意思?就是说图象空间,语言空间,就是一个大集合,全集。我们的每个概念往往是它的一个子集,比如说,所有的图象是一个集合,一百万个象素就是一百万维空间,每张图像就是这百万维空间的一个点。人脸是个概念,所有的人脸就是在这一百万维空间的一个子集,但是这个子集和其它个子集要发生关系,这个关系叫拓扑关系。计算机的人把它叫做语法,对应于代数拓扑。比如,头和脖子在肩膀上是合规的,概率很高。这个图像空间的结构其实就是语法,这个语法就是STC-AOG,时空因果的与或图。语法可导出“语言”,语言就是一个符合语法的句子的总的集合。STC-AOG就是知识的总体表达,而我们看到的眼前每一个例子是由STC-AOG导出来的时空因果解译图STC-PG。计算机视觉用它,语言肯定用它,认知是它,机器人任务规划也是它。这就是一个统一的表达。
最后,我想谈一点,语言与视觉更深层的联系、与数学中代数拓扑的联系。拓扑学是什么意思?就是说图象空间,语言空间,就是一个大集合,全集。我们的每个概念往往是它的一个子集,比如说,所有的图象是一个集合,一百万个象素就是一百万维空间,每张图像就是这百万维空间的一个点。人脸是个概念,所有的人脸就是在这一百万维空间的一个子集,但是这个子集和其它个子集要发生关系,这个关系叫拓扑关系。计算机的人把它叫做语法,对应于代数拓扑。比如,头和脖子在肩膀上是合规的,概率很高。这个图像空间的结构其实就是语法,这个语法就是STC-AOG,时空因果的与或图。语法可导出“语言”,语言就是一个符合语法的句子的总的集合。STC-AOG就是知识的总体表达,而我们看到的眼前每一个例子是由STC-AOG导出来的时空因果解译图STC-PG。计算机视觉用它,语言肯定用它,认知是它,机器人任务规划也是它。这就是一个统一的表达。
第八节博弈伦理:获取、共享人类价值观
机器人要与人交流,它必须懂得人类价值观。哲学和经济学里面有一个基本假设,认为一个理性的人(rationalagent),他的行为和决策都由利益和价值驱动,总在追求自己的利益最大化。与此对应的是非理性的人。对于理性的人,你通过观察他的行为和选择,就可以反向推理、学习、估算他的价值观。我们暂时排除他有可能故意假装、迷惑我们的情况。
这个价值观我们把它表达为一个利益函数Utilityfunction,用一个符号U表示。它通常包含两部分:(1)Loss损失函数,或者Reward奖励函数;(2)Cost消费函数。就是说,你做一件事得到多少利益,花费多少成本。我们可以把这个利益函数定义在流态的(fluents)空间里面。我们每次行动,改变某些流态,从而在U定义的空间中向上走,也就是“升值”。由函数U对流态向量F求微分的话,就得到一个“场”。
复习一下高等数学,我们假设一个人在某个时期,他的价值取向不是矛盾的。比如,如果他认为A比B好,B比C好,然后C比A好,那就循环了,价值观就不自恰。这在场论中就是一个“漩涡”。一个处处“无旋”的场,就叫做一个保守场。其对于的价值观U就是一个势能函数。
所谓“人往高处走、水往低处流”说的是社会和物理的两个不同现象,本质完全一致。就是人和水都在按照各自的势能函数在运动!那么驱动人的势能函数是什么呢?
人与人的价值不同,就算同一个人,价值观也在改变。本文不讨论这些社会层面的价值观,我们指的是一些最基本的、常识性的、人类共同的价值观。比如说把房间收拾干净了,这是我们的共识。
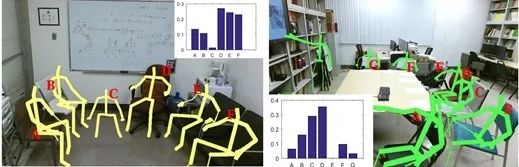
上图是我做的一个简单的实验。我把几种不同的椅子、凳子放在我办公室(左图)和实验室(右图)。然后,我统计一下学生进来以后,他喜欢坐哪个椅子,实在不行可以坐地上。这样我就可以得到这些椅子的排序。A、B、C、D、E、F、G排个序,见上面的统计图。我观察了这些人的选择,就问:为什么这个椅子比那个椅子好?是什么好?这其实就反映了人的脑袋里面一个基本的价值函数。又说一遍:很普通的日常现象,蕴含深刻的道路。苹果落地不是这样吗?大家司空见惯了,就不去问这个问题了。
为了解答问题,我的两个博士生朱毅鑫和搞物理和图形学的蒋凡夫(他刚刚去Upenn宾州大学当助理教授),用图形学的物理人体模型模拟人的各种的姿势,然后计算出这些坐姿在这些椅子上的时候,身体几大部件的受力分布图。见下图,比如背部、臀部、头部受多少力。

下图中蓝色的直方图显示了六个身体部位的受力分别图。由此我们就可以推算出每个维度的价值函数。下面图中六条红色的曲线是负的价值函数,当人的坐姿使得各部位受力处于红线较低的值,就有较高的“价值”,也就是坐得“舒服”。当然每个人可能不一样,有的人腰疼必须坐硬板凳子有的人喜欢坐软沙发。这也是为什么,如果你观察到有些异样,可以推导这个人某地方可能受伤了。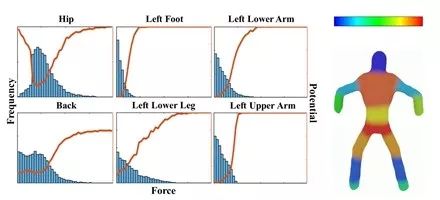
读到这里,你不禁要问:这不是与物理的势能函数,如重力场,一样吗?对,就是一个道理。这也是在最后一节我将要说的:达尔文与牛顿的理论体系要统一。
这对我们是常识,但是机器人必须计算出很多这样的常识,TA需要设身处地为人着想,这个就不容易了。
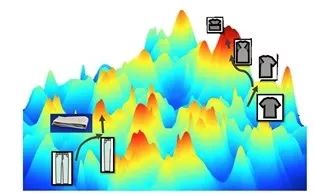
叠衣服也是我们做的另外一个例子。如果我们把这个保守的势能函数可视化为一个地形图,那么你叠一个衣服的过程,就像走一条登山的路径。这个衣服我们原来搞乱了,它对应的状态在谷底,最后叠好了就等于上到山顶了。每一步动作就有一个奖励reward。我根据你叠衣服的过程,把这山形状基本画出来,机器就知道叠衣服这个任务的本质是什么。你给它新的衣服,它也会叠了。机器人可以判断你的价值观。
最近大家谈论较多的是机器人下棋,特别是下围棋,的确刺激了国人的神经。下棋程序里面一个关键就是学习价值函数,就是每一个可能的棋局,它要有一个正确的价值判断。最近,各种游戏、和增强学习也比较火热。但这些研究都是在简单的符号空间里面玩。我实验室做的这两个例子是在真实世界,学习人的价值函数。
有了价值函数,在一个多人环境中,就有了竞争与合作,形成我们上一节谈到的社会规范、伦理道德。这些伦理、社会规范就是人群在竞争合作之中,受到外部物理环境与因果限制下,达成的暂时的准平衡态。每种平衡态不见得是一个固定的规则,要求大家做同样的规定动作,而是一种概率的“行为的语法”。规则其实就是语法。说到底,这还是一种概率的时空因果与或图STC-AOG的表达。
在社会进化过程中,由于某些边界条件的改变(如新的技术发明,像互联网、人工智能)或者是政策改变(如改革开放),打破了旧的平衡,社会急剧变化;然后,达成新的准平衡态。那么社会规范对应的是另一个时空因果与或图STC-AOG。你拿着一个准平衡态的STC-AOG模型去到另一个准平衡态生活,就出现所谓的“水土不服”现象。
谈到这里,我想顺便对比两大类学习方法。
一、归纳学习Inductivelearning。我们通过观察大量数据样本,这些样本就是对某个时期、某个地域、某个人群达成的准平衡态的观察。也是我前面谈过的千年文化的形成与传承。归纳学习的结果就是一个时空因果的概率模型,我把它表达为STC-AOG。每个时空的动作是一个STC-PG,解译图。
二、演绎学习Deductivelearning。这个东西文献中很少,也就是从价值函数(还有物理因果)出发,直接推导出这些准平衡态,在我看来,这也是一个STC-AOG。这就要求对研究的对象有深刻的、生成式的模型和理解。比如,诸葛亮到了祁山,先查看地形,知道自己的队伍、粮草情况,摸清楚对手司马懿的情况(包括性格)。然后,他脑袋里面推演,就知道怎么布局了。
人的学习往往是两者的结合。年轻的时候,归纳学习用得多一些,演绎学习往往是一种不成熟冲动,交点学费,但也可能发现了新天地。到了“五十而不惑”的时候,价值观成型了,价值观覆盖的空间也基本齐全了,那么基本上就用演绎学习。
AlphaGo先是通过归纳学习,学习人类大量棋局;然后,最近它就完全是演绎学习了。AlphaGo的棋局空间与人类生存的空间复杂度还是没法比的。而且,它不用考虑因果关系,一步棋下下去,那是确定的。人的每个动作的结果都有很多不确定因素,所以要困难得多。
待续。。。。

共有条评论 网友评论